 Polski
Polski-
 English
English -
 Français
Français -
 日本語
日本語 -
 Deutsch
Deutsch -
 tiếng Việt
tiếng Việt -
 Italiano
Italiano -
 Nederlands
Nederlands -
 ภาษาไทย
ภาษาไทย - Polski
-
 한국어
한국어 -
 Svenska
Svenska -
 magyar
magyar -
 Malay
Malay -
 বাংলা ভাষার
বাংলা ভাষার -
 Dansk
Dansk -
 Suomi
Suomi -
 हिन्दी
हिन्दी -
 Pilipino
Pilipino -
 Türkçe
Türkçe -
 Gaeilge
Gaeilge -
 العربية
العربية -
 Indonesia
Indonesia -
 Norsk
Norsk -
 تمل
تمل -
 český
český -
 ελληνικά
ελληνικά -
 український
український -
 Javanese
Javanese -
 فارسی
فارسی -
 தமிழ்
தமிழ் -
 తెలుగు
తెలుగు -
 नेपाली
नेपाली -
 Burmese
Burmese -
 български
български -
 ລາວ
ລາວ -
 Latine
Latine -
 Қазақша
Қазақша -
 Euskal
Euskal -
 Azərbaycan
Azərbaycan -
 Slovenský jazyk
Slovenský jazyk -
 Македонски
Македонски -
 Lietuvos
Lietuvos -
 Eesti Keel
Eesti Keel -
 Română
Română -
 Slovenski
Slovenski -
 मराठी
मराठी -
 Srpski језик
Srpski језик -
 Español
Español -
 Português
Português


Dom
>
Produkty > Połączona maszyna tokarsko-frezarska
>
Połączona maszyna do obracania i mielenia power Turning
Produkty






Połączona maszyna do obracania i mielenia power Turning
Jako profesjonalni producenci, Jingfusi® jest dumny z prezentacji naszej maszyny do obracania i mielenia wirusowego. Jesteśmy zaangażowani w świadczenie najwyższej jakości usług po sprzedaży i zapewnieniu terminowej dostawy produktu. Aby utrzymać spójną jakość naszych maszyn, przestrzegamy znormalizowanego podejścia zarówno w konstrukcji ciała, jak i zespole konfiguracji. Wymaga to użycia jednolitych akcesoriów (w tym wymiennej głowicy zasilania uchwytu noża i wieży narzędziowej na płycie łóżka) w celu zapewnienia stabilności i niezawodności. Nasza maszyna została zaprojektowana z prostą i praktyczną strukturą, dostosowaną do aplikacji w świecie rzeczywistym i zaprojektowana do obsługi przyjaznej dla użytkownika.
Model:CK52DTY
Wyślij zapytanie
Opis produktu
Jako profesjonalny producent, Jingfusi® chcielibyśmy zapewnić połączoną maszynę do obracania i mielenia.

Szczegóły produktu
Lista parametrów
| przedmiot | Model tokarki | jednostka | CK46DTY | CK52dty |
| Zakres przetwarzania | Maksymalna średnica obrotu wrzeciona | mm | Ø 600 | |
| Maksymalna długość koła zewnętrznego | mm | 300 | ||
| Maksymalna średnica baru | mm | Ø 45 | Ø 55 | |
| Oś główna | Maksymalna prędkość wrzeciona | R/min | 6000 (ustawienie 4500) | 4200 (ustawienie 3500) |
| Typ głowy wrzeciona |
|
A2-5 | A2-6 | |
| Średnica wrzeciona | mm | Ø 56 | Ø 66 | |
| karmić | Maksymalny skok x/z/y | mm | 800/400/± 60 | |
| Głowica zasilania 90 ° przechodząca przez środek wrzeciona | mm | 60 | ||
| Maksymalny szybki ruch osi x/z/y | m/my | 24 (ustawienie 18) / 24 (ustawienie 18) / 15 (ustawienie 12) | ||
| Piętko śrubowe X/z/y | mm | 32/32/32 | ||
| Ścieżka wałka osi X/z/y | mm | 35/35/35 | ||
| Power Turre |
Model Power Turre (Power Turre) | BMT | BMT45, Opcjonalnie BMT55 | |
| Power Head Collet | JEST | ER25 | ||
| Naprawiono rozmiar uchwytu narzędzia | mm | 25x25 | ||
| Średnica trzonku otworu | mm | Ø25 | ||
| Ogon | Główna moc/moment obrotowy | KW / nm | 7,5 kW/oceniane 47 nm | 11 kW/oceniany 72 nm |
| X/z/y Oś silnik/moment obrotowy | KW / nm | Yaskaawa 1.8kW/11,5N. Opcjonalna nowa generacja 2.4 kW/ocena 11,5 nm | ||
| Maksymalna prędkość silnika zasilania wieży | R/min | 80000 ° (głowica mocy ≤7000 Zmiana, 90 ° Głowica zasilania ≤6000 Zmiana) | ||
| Moc silnika zasilania/moment obrotowy | KW / nm | 8,5 kW/oceniany 16,5 nm | ||
| Moc/moment obrotowy silnika zmieniającego narzędzia wieży | KW / nm | Nowa generacja 1,0 kW /3,1 nm | ||
| Inny | Urządzenie hamulcowe wrzecionowe |
|
Ciśnienie hydrauliczne | |
| Nachylenie łóżka | ° | 35 ° | ||
| Długość maszyny x szerokość x Wysokość | mm | 2200X1500X1900 | ||
| Całkowita waga całej maszyny | Kg | 3900 kg | ||
| Całkowita moc | kW | 15 | ||
| Średnie zużycie energii | KW / H. | 3 | ||
Dokładność maszyny
| Dokładność maszyny, standard współczynnika Jingfus : | ||||||||
| Główny element testowy | Schematyczny schemat | Standard fabryczny | ||||||
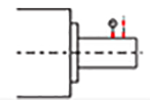
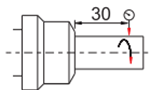
| Radialny rytm wrzeciona |

|
Wykryć kontynuowanie stożka zewnętrznego | 0.0035 | |||||
| Pozycja powtarzania osi x |
|
Wykryć powtarzające się pozycjonowanie osi x. Uwaga: Najpierw przewiduj około 50 razy, aby zrównoważyć błąd zimnego silnika i gorącego silnika, a następnie wykryć powtarzające się pozycjonowanie. | 0.003 | |||||
| Pozycja powtarzania osi Z. |
 |
Wykryć powtarzające się pozycjonowanie na osi Z. Uwaga: Najpierw przewiduj około 50 razy, aby zrównoważyć błąd zimnego silnika i gorącego silnika, a następnie wykryć powtarzające się pozycjonowanie. | 0.003 | |||||
| Pozycja powtarzania osi Y. |
|
Wykryć powtarzające się pozycjonowanie na osi y. Uwaga: Najpierw przewiduj około 50 razy, aby zrównoważyć błąd zimnego silnika i gorącego silnika, a następnie wykryć powtarzające się pozycjonowanie. | 0.004 | |||||
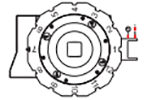
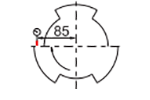
| Pozycja powtórzeń osi C |
|
Wykryj zmianę ustalonego punktu osi C, Uwaga: Najpierw przewiduj około 50 razy, aby zrównoważyć błąd zimnego silnika i gorącego silnika, a następnie wykryć powtarzane pozycjonowanie | 20 sekund łukowych | |||||
| Pozycja osi C |

|
Wykryj dokładność losowej pozycji osi C, Uwaga: Najpierw przewiduj około 50 razy, aby zrównoważyć błąd zimnego silnika i gorącego silnika, a następnie sprawdź powtarzane ustawienia | 72 sekundy łukowe | |||||
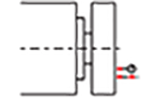
| Zasilanie głowicy rytmu |
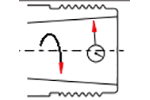
|
Stożka bicie | 0.015 | |||||
| Zasilanie głowicy rytmu |
 |
Zacisanie bicia | 0.01 | |||||
| Jeżeli klient chce przetestować dokładność ISO lub VD1 osi x/z/y, zostanie to ustalone w momencie pisania umowy. Klient musi przetestować ten przedmiot w tym samym czasie początkowej akceptacji fabryki Jingfusi. | ||||||||
Gorące Tagi: Power Turning and frezing Machine, Chiny, producenci, dostawcy, fabryka, jakość, cennik
Etykieta produktu
Wyślij zapytanie
Prosimy o przesłanie zapytania w poniższym formularzu. Odpowiemy ci w ciągu 24 godzin.









X
We use cookies to offer you a better browsing experience, analyze site traffic and personalize content. By using this site, you agree to our use of cookies.
Privacy Policy